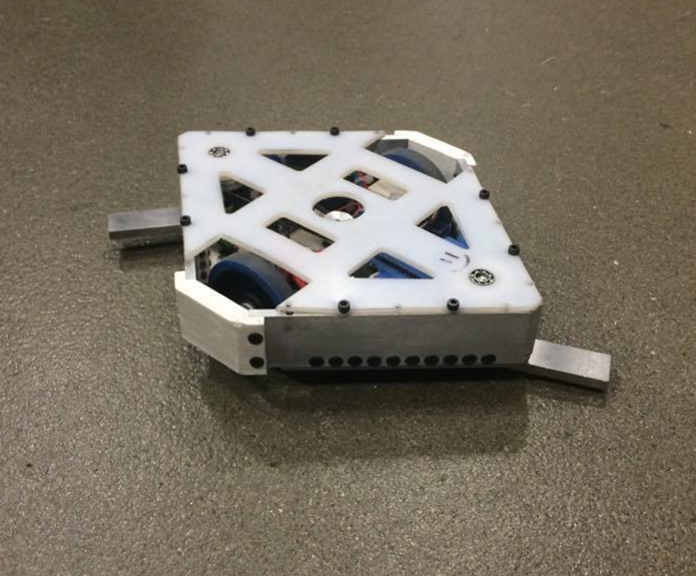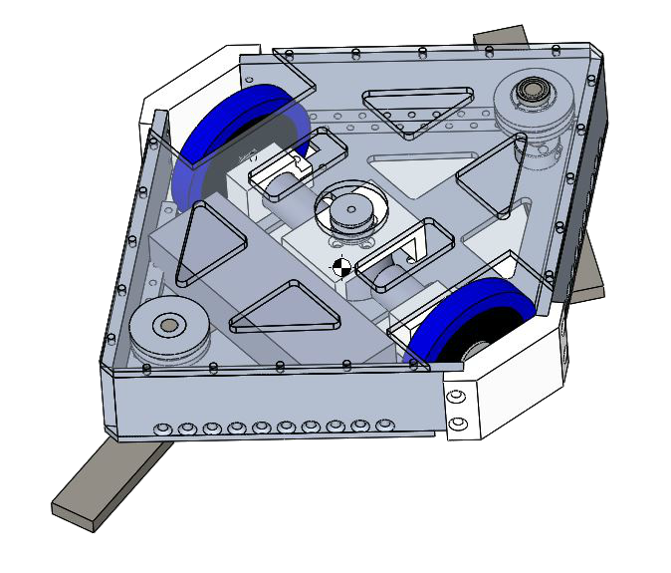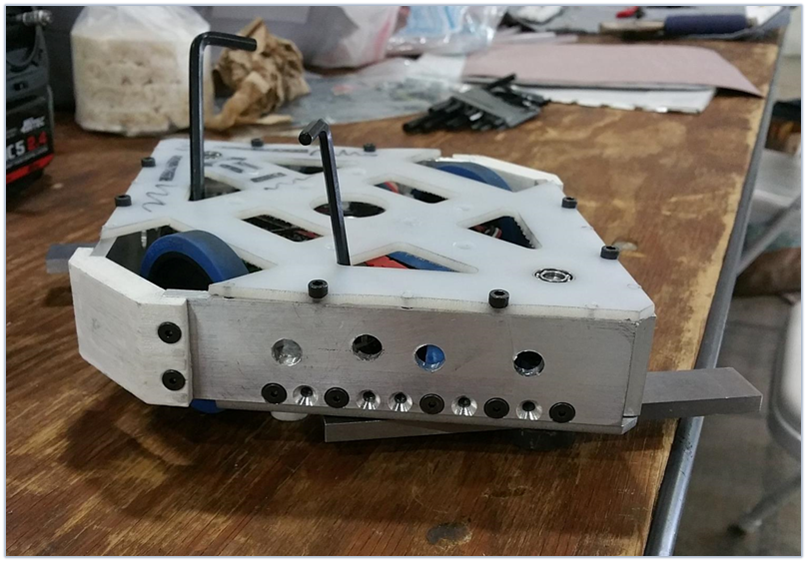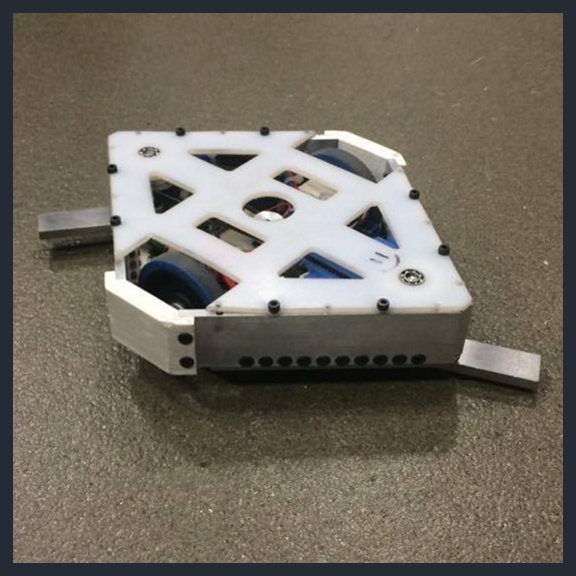
BruinBash 3-lb Battlebot
My first major manufacturing project came with joining the Battlebots branch of UCLA’s American Society of Mechanical Engineers (ASME). A single brushless motor drove two spinning bars at either end of the robot via a part resembling two stacked pulleys. By spinning in a circle, the robot simultaneously maximized its offensive and defensive capabilities without the volatility of a full-body spinner. The drive motors were 50:1 Copal Gearmotors, which provided the desired high torque for greater mobility. Their respective motor controllers were the Sabertooth 5A Motor Driver and the DYS 40A Brushless ESC, chosen based on the amperage used.